
Hélices d'avion 3D
- Luca

- 7 gen 2022
- Tempo di lettura: 1 min
Aggiornamento: 18 mag 2022
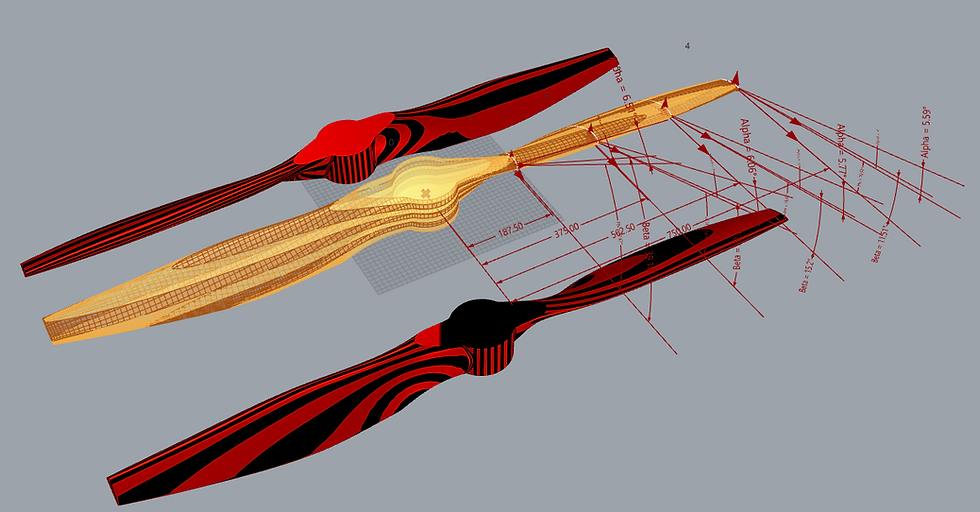
A la demande d'un fabricant d'hélices j'ai fait une définition en Grasshopper pour le dessin rapide d'hélices. La maîtrise des formes est totale : rayon d'hélice, pas, nombre de postes, profil pour chaque poste avec possibilité d'affecter l'angle d'incidence aérodynamique nul (alpha 0), longueur de chaque corde et escalier éventuel à une ou deux dimensions proches le hub pour personnaliser le montage.

La variation de pas peut être choisie pour que l'incidence aérodynamique soit, autour de 70-75% du rayon, celle d'une plus grande efficacité. Le contrôle que vous avez sur les formes vous permet d'apporter des modifications rapides puis de retraiter le modèle 3D avec un solveur CFD.


Phi est l'angle du vecteur vitesse du vent résultant (V_air + V_périphérique, voir images ci-dessus) et est calculé après avoir affecté la vitesse de rotation du moteur en RPM et la vitesse d'avancement (ci-contre).
Le coefficient de Reynolds à chaque station (ci-dessous) et la solidité sont calculés. Le calcul de la traction se fait avec Xrotor téléchargeable gratuitement sur qui.
Vous trouverez ci-dessous un résumé des entrées et sorties renvoyées par le programme de modélisation :

L'hélice précitée a été étudiée dans Xrotor en réglant les données aérodynamiques du profil Clark-Y extraites du site airfoiltools.com et les données géométriques obtenues à partir du dessin 3D et listées ci-dessus.

L'hélice, dès une première approche préliminaire, semble avoir de bonnes caractéristiques en termes de performances et de traction. L'étape suivante est le prototypage et la vérification des données obtenues.
La surface résultante est en fait fermée et prête pour l'impression 3D ou le traitement CN.

Ci-dessous un rendu.

Vous trouverez ci-dessous une courte vidéo de démonstration même si elle n'est pas mise à jour.